
Produtos



ventosa manipulação de vidro manipulador pneumático
Breve descrição:
O manipulador pneumático, também conhecido como manipulador, guindaste de equilíbrio, impulsionador de equilíbrio, máquina de transferência manual de carga (a afirmação acima não é profissional, mas é popular na China), é um romance, usado para manuseio e instalação de materiais e operação de economia de trabalho de equipamentos de energia.

O manipulador pneumático de manuseio de vidro com ventosa aplica o princípio de equilíbrio da força, para que o operador possa empurrar e puxar o objeto pesado de acordo, o que pode equilibrar o posicionamento móvel no espaço. a força de operação é garantida pela estrada de gás (o processo de processamento e controle de custos de projeto, a força de operação é inferior a 3kg como padrão de julgamento) a força de operação é afetada pelo peso da peça de trabalho. o operador pode empurrar e puxar o objeto pesado com a mão e colocar o peso corretamente em qualquer posição do espaço.

sobre nós

Somos um fabricante profissional de equipamentos de automação personalizados. Nossos produtos incluem despaletizador, máquina de embalagem pick and place, paletizador, aplicação de integração de robô, manipuladores de carga e descarga, formação de caixas, selagem de caixas, dispensador de paletes, máquina de embalagem e outras soluções de automação para linha de produção de embalagens back-end.
Nossa área fabril é de cerca de 3.500 metros quadrados. A equipe técnica principal tem uma média de 5 a 10 anos de experiência em automação mecânica, incluindo 2 engenheiros de projeto mecânico. 1 engenheiro de programação, 8 trabalhadores de montagem, 4 pessoas de depuração pós-venda e outros 10 trabalhadores
Nosso princípio é “cliente em primeiro lugar, qualidade em primeiro lugar, reputação em primeiro lugar”, sempre ajudamos nossos clientes a “aumentar a capacidade de produção, reduzir custos e melhorar a qualidade” nos esforçamos para nos tornarmos um fornecedor líder na indústria de automação de máquinas.
- 1. Estrutura: O manipulador de potência totalmente pneumático é composto principalmente pelo host de armazenamento da instalação e pelo acessório.2. A fundação de instalação é dividida em: 1. Coluna fixa 2. Base móvel 3. Suspensão de teto fixa 4A suspensão de teto é móvel
3. Dispositivo elétrico: Geralmente personalizado de acordo com o tamanho da aparência da peça fornecida pelo cliente.1. tipo de gancho; 2. tipo de compreensão; 3. tipo de aperto; 4. tipo de elevação interna; 5. tipo de elevação; 6. tipo de aderência; 7. transformação de giro do punho (virar 90° ou 180°) 0; 8. adsorção a vácuo; 9. Transformação de rotação de adsorção a vácuo (flip 90° ou 180°) e outras, especificamente selecionadas, desenvolvidas e projetadas, alcançaram um bom efeito de uso.
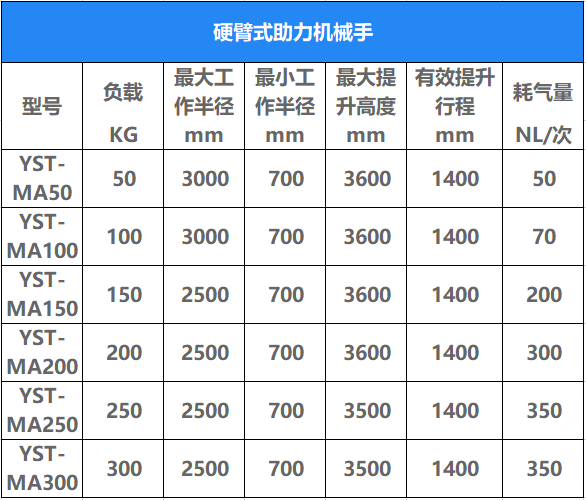
4. Host: composto principalmente por cilindro balanceado e cantilever rígido de desligamento múltiplo, e os principais parâmetros são capacidade de elevação e raio de serviço.
Descrição do produto
manipulação de vidro com ventosas Os manipuladores pneumáticos foram projetados para operar com cargas suspensas. Por esta razão são absolutamente necessários para carga e descarga de máquinas industriais. Graças aos acessórios pneumáticos e acessórios especiais, é possível não só levantar peças, mas também rodar, inclinar e virar de cabeça para baixo ou, mais simplesmente, incliná-las.
Recursos do produto
1. O manipulador de potência totalmente pneumático é composto principalmente pelo host de armazenamento da instalação e pelo acessório.
2. A fundação de instalação é dividida em: 1. Coluna fixa 2. Base móvel 3. Suspensão de teto fixa 4A suspensão de teto é móvel
3. Dispositivo elétrico: Geralmente personalizado de acordo com o tamanho da aparência da peça fornecida pelo cliente.1. tipo de gancho; 2. tipo de compreensão; 3. tipo de aperto; 4. tipo de elevação interna; 5. tipo de elevação; 6. tipo de aderência; 7. transformação de giro do punho (virar 90° ou 180°) 0; 8. adsorção a vácuo; 9. Transformação de rotação de adsorção a vácuo (flip 90° ou 180°) e outras, especificamente selecionadas, desenvolvidas e projetadas, alcançaram um bom efeito de uso.
4. Host: composto principalmente por cilindro balanceado e cantilever rígido de desligamento múltiplo, e os principais parâmetros são capacidade de elevação e raio de serviço.







